Commençons par une explication visuelle de mon TCO et une partie de sa construction.
Un TCO xpressnet
.
Par :
DIFFICULTÉ : ![]()
<
Je possède actuellement une centrale DCC, qui a la particularité de parler xpressnet, et j’ai la joie de posséder une Multimauss comme télécommande. En plus d’une Multimauss je voulais un Tableau de Controle Optique pour contrôler mes aiguillages (disons que la Multimauss, c’est bien, mais retenir les numéros des aiguillages c’est un peu pénible).
Comme je suis en DCC, je voulais éviter d’avoir un fouillis de câbles à tirer (2 par aiguillage), mais plutôt avoir un TCO qui parle Xpressnet, pour envoyer les ordres aux aiguillages. Bref quelque chose comme :
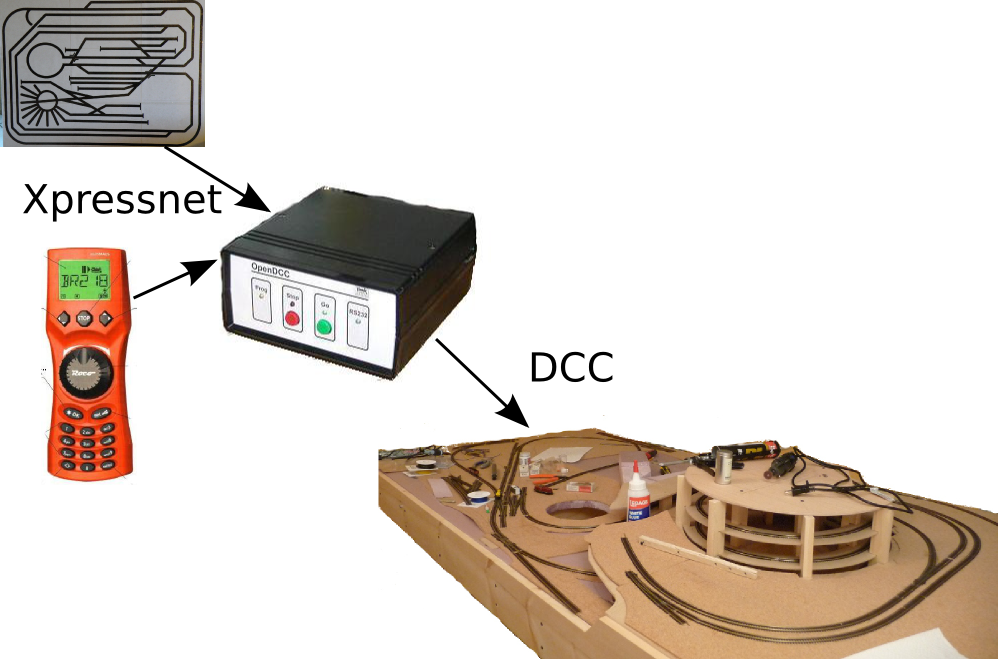
Ca veut dire :
- un TCO avec des boutons
- un Arduino qui va récupérer l’état des boutons
- et le même Arduino qui va envoyer les ordres par xpressnet
Récupérer l’état des boutons
Ca c’est pas très compliqué. Un petit schéma électrique comme ci-dessous, et ca marche rapidement :
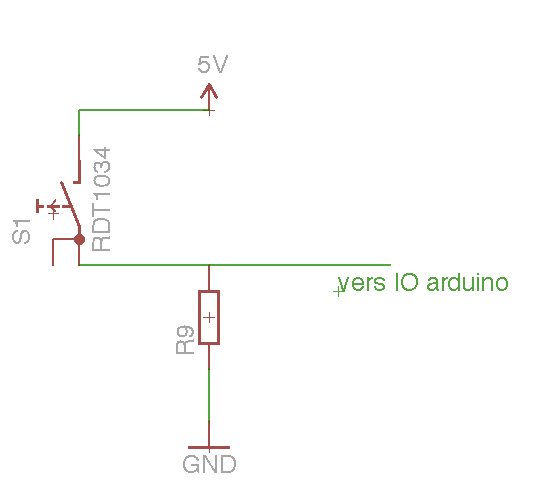
On utilise digitalRead() et on obtient HIGH ou LOW, selon l’état du bouton. Simple.
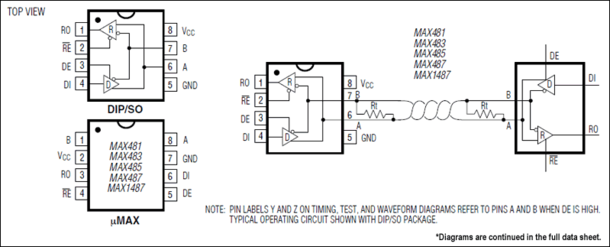
Liaison RS485
Ensuite, pour connecter l’Arduino à la centrale c’est un peu plus compliqué. Le protocole xpressnet est basé sur une liaison RS485, sur du câble téléphonique à 6 fils (RJ12). Attention ce n’est pas du RJ11 (la prise est la même, mais il n’y a que 4 fils). Le RS485 c’est une liaison half-duplex sur 2 fils, avec une différence de voltage de +/- 5v. Pour piloter ce genre de liaison, on utilise un chipset Max485cpa. Voici une image tirée de la documentation du Max485 :
Dans le cas de xpressnet, on a 6 fils :
- 2 avec le DCC (+ et -) si on souhaite lire les paquets
- 2 fils d’alimentation (si on veut avoir une télécommande auto-alimentée)
- et les 2 fils de liaison (nommé A et B).
Voilà comment j’ai câblé, cf ci-dessous. On remarquera que j’ai la même terre, mais je n’utilise pas l’alimentation 12v. Simplement parce que je n’autoalimente pas (encore) mon TCO, mais ca va venir. Autre point : si votre communication avec la centrale ne marche pas inverser A et B. Pour moi il y a un sens A-B qui marche et pas l’autre.
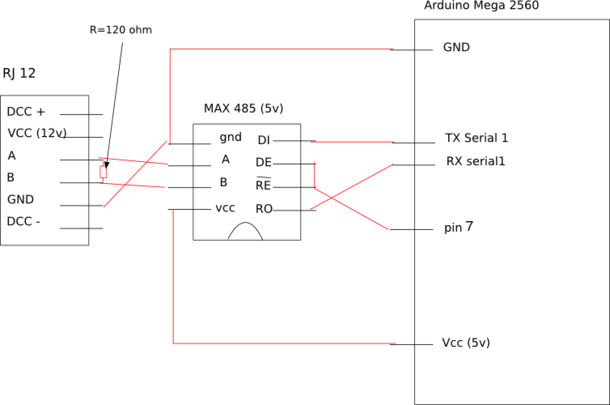
Honnêtement c’est la partie la plus difficile à debugger : savoir si le câblage physique est bien fait. J’ai même été jusqu’à utiliser un oscilloscope bon marché. Sinon il existe des PCB tout fait pour Arduino, mais je ne sais pas ce que ça vaut.
Choix de l’Arduino
Pour mon montage j’ai utilisé un Arduino Mega 2560. Pourquoi ? Parce que xpressnet est un protocole série 9 bits a 62.5 kbit/s. Le SDK Standard d’Arduino ne propose pas de bibliothèque série 9 bits, mais quelqu’un l’a fait sur un Arduino mega 2560, par conséquent le choix de l’Arduino est limité.
Il faut donc :
- avoir un Arduino Mega 2560 ;
- récupérer dans mon dépot, dans le répertoire
arduinoSdkles fichiersHardwareSerial.hetHardwareSerial.cpp; - les utiliser pour remplacer ceux dans le SDK Arduino (dans
/hardware/arduino/avr/cores/arduino/) ; - et bien entendu choisir Arduino Mega 2560 dans l’IDE d’Arduino IDE (dans Tools/Board)
Une fois tout ca fait, on est prêt pour la partie logicielle.
Le code
Tout le code se trouve sur mon depôt : https://github.com/nzin/xpressnet_a....
Ce que fait le code :
- la fonction
setup()va initialiser la communication xpressnet (le port, la vitesse ...) - la fonction
loop(), va appellerdecodeXpressnet, si des données sont présentes - la fonction
decodeXpressnet(), va décoder les trames xpressnet - si c’est à nous de parler (car la centrale attribue à tour de rôle aux 32 possibles télécommandes un droit de parole) alors j’appelle la fonction
poolEvent() - et c’est là que vous pouvez mettre votre code (comme lire l’état du TCO, et agir en conséquence)
- pour envoyer des ordres les différentes commandes mettent ca dans une pile (
XpressCommand *stack) et le code va envoyer les commandes les une après les autres, car on a le temps d’envoyer juste une commande par temps de parole.
Attention : pour activer un aiguillage, il faut envoyer 2 commandes :
sendSwitchCommand(<aiguille>,<sens: 0 ou 1>,1);
sendSwitchCommand(<aiguille>,<sens: 0 ou 1>,0);la première active le changement de commande, la deuxième arrête l’activation. Le protocole veut ça.
Par conséquent, on peut mettre dans poolEvent quelque chose comme le code ci-dessous :
- on va envoyer la prochaine commande qui était dans la pile
- on regarde l’état du TCO (commande
checkTCOState()) - et ensuite toutes les 3 secondes on va basculer sur la gauche l’aiguille 37, et 3 secondes plus tard, on le remet dans sa position initiale.
const int turnout=37;
void poolEvent() {
XpressCommand *ptr;
if (stack!=NULL) {
ptr=stack;
ptr->writeData(GIO_RXTX,Serial1);
stack=ptr->next();
delete ptr;
}
checkTCOState();
if (count==0) {
count=millis();
}
if (millis()>count+3000) {
count=millis();
switch(ope++) {
case 0:
sendSwitchCommand(turnout,1,1);
sendSwitchCommand(turnout,1,0);
break;
case 1:
sendSwitchCommand(turnout,0,1);
sendSwitchCommand(turnout,0,0);
ope=0;
break;
}
}
}Mais on n’est pas obligé de juste piloter des aiguillages :
-
sendStopallLocomotivesRequest()demande à arrêter toutes les locomotives ; -
sendStopOperationsRequest()doit arrêter tout le réseau (couper l’alimentation sur le réseau DCC) ; -
sendResumeOperationsRequest()doit rétablir l’alimentation ; - et vous pouvez re-implémenter les autres commandes xpressnet en lisant la documentation officielle : http://www.lenzusa.com/1newsite1/Ma....
Après je vous laisse explorer le code, et me poser des questions :-)
{kind=link}