L’Arduino a de multiples raisons de trouver sa place dans les systèmes de pilotage des modèles réduits ferroviaires, qu’ils soient numériques ou analogiques. Mais probablement plus encore pour les systèmes numériques, notamment parce que les accessoires ne sont pas numériques et un Arduino peut remplacer un décodeur du commerce.
Ce premier article va s’intéresser aux deux systèmes sans favoritisme, en révélant leurs différences, leurs similitudes, les ponts et points de passage de l’un à l’autre.
Vous possédez déjà un système, quelques modules Arduino vous permettront de le compléter.
Vous n’avez pas encore fait votre choix, c’est l’occasion rêvée de concevoir votre système sur mesure ! Et tout cela sans vous ruiner, ni vous épuiser dans la programmation. Locoduino vous proposera une solution qu’il vous faudra adapter à votre réseau.
Le but de cet article est de vous présenter toutes les opportunités d’introduire un ou plusieurs modules à base d’Arduino dans un système digital ou analogique. Mais il faut d’abord commencer par définir ce qu’est un système de pilotage ferroviaire.
Définitions
Les rails et la traction
Un réseau ferroviaire commence toujours par des rails, une locomotive (et éventuellement quelques voitures ou wagons) et une alimentation électrique.
Si le système est analogique, l’alimentation délivre une tension variable en fonction de la vitesse désirée, soit continue, avec un rhéostat, soit en impulsions modulées (PWM). Mais elle ne permet de piloter qu’un tronçon de rails auquel l’alimentation est raccordée, soit la et les locomotives présentes sur ce morceau sans aucune distinction.
Dans cette optique de piloter plusieurs trains avec une alimentation, 2 façons simples sont à notre disposition :
la première consiste en une seule alimentation et à la coupure du réseau en cantons commandés par des interrupteurs qui alimentent ou non en courant la voie.
soit nous avons la possibilité d’alimenter la voie avec plusieurs alimentations, de faire en fait un réseau composé de zones alimentées séparément.
Il est aussi évident que bon nombre de solutions existent encore. Nous avons pris deux cas élémentaires.
Déjà à ce point précis de l’article, on peut entrevoir le rôle d’un Arduino en charge de la production et de la coordination des alimentations d’un système analogique. Nous y reviendrons plus tard.
Le transformateur analogique fournit toujours sur une deuxième sortie une tension alternative destinée à commander les accessoires (aiguilles, passages à niveau, éclairages, etc..) à travers des boutons poussoirs ou inverseurs qu’on dispose sur un tableau de commande.
Rien n’empêche d’utiliser nos petits Arduinos pour assurer ces commandes avec élégance et sophistication !
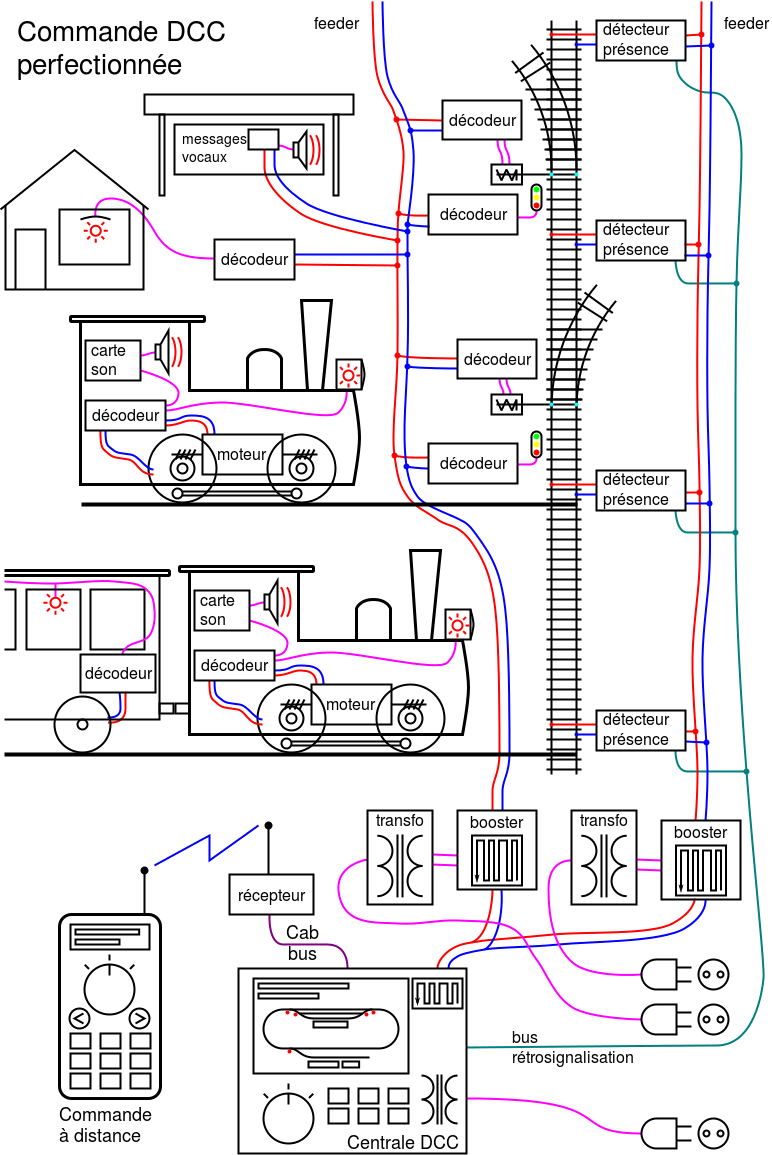
Si le système est numérique (digital en anglais), la promesse (commerciale) d’une alimentation numérique est de permettre de piloter plusieurs trains et accessoires à partir de 2 fils seulement connectés aux rails. Ces 2 fils conduisent à la fois la puissance de traction ET des ordres de pilotage du matériel roulant (vitesses, fonctions des locos telles que lumière, sons, etc..). Cette simplification extrême est représentée sur la figure suivante qui met en oeuvre une centrale DCC (avec son amplificateur dit "Booster", ici intégré à la centrale) et des décodeurs dans chaque loco.
Le protocole DCC est le plus répandu, mais il existe cependant d’autres protocoles comme le MFX ou celui de MOTOROLA, plus anciens.
A ce stade, l’Arduino pourra être aussi impliqué dans la production du signal DCC et la commande des accessoires (comme en analogique). Des exemples sont décrits dans ce site.
Mais, même si un avantage du numérique apparaît déjà avec la possibilité de piloter plusieurs machines sur une même voie, la partie n’est pas gagnée car un réseau ferroviaire ne se résume pas à ces seuls éléments.
Il faut compter avec les décodeurs à installer dans les trains et accessoires. Et il faut aussi envisager d’intégrer la rétrosignalisation pour assurer quelques automatismes.
Figure 2
Un système DCC simple. Schéma inspiré de wikipedia.
Ce système DCC simple est en général constitué de deux parties : une manette de commande et un générateur de puissance.
Les plus populaires sont la Multimaus de Roco/Fleischmann et la MS2 de Märklin (représentée ci-dessous). Mais l’offre est immense et le choix difficile car les combinaisons d’éléments de marques différentes sont peu nombreuses et onéreuses. D’où l’interêt de l’Arduino pour se passer de ces éléments onéreux et satisfaire exactement ses propres besoins, le propre du DIY
Figure 3
Un kit de démarrage extensible (Minitrix)
L’interface Homme-Machine
Que le réseau soit analogique ou numérique, il ne se résume pas à la commande de quelques convois. Pour permettre de belles manœuvres, il faudra commander des aiguillages, des barrières de passage à niveau, des feux de signalisation, des éclairages et probablement aussi des animations lumineuses et sonores (annonces en gare, bruits et lumières d’un garage, fête foraine, etc..).
Nous les pilotes humains avons besoin d’organes de commande ergonomiques, que ce soient des manettes (Throttle en anglais), des TCOs (tableau de contrôle opérationnel), voire sur nos smartphones, tablettes et ordinateurs (avec un logiciel de pilotage). En informatique, on appelle cela l’IHM (Interface Homme Machines - au pluriel bien sûr).
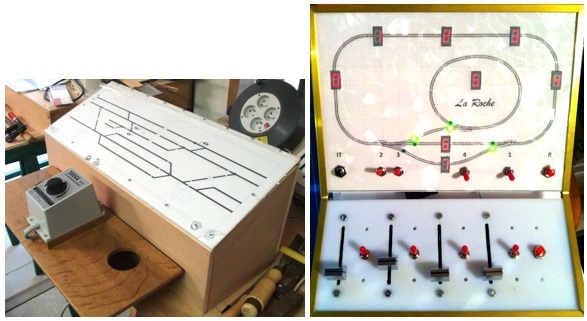
Voici deux exemples de TCO pour représenter le circuit, les positions des trains et des aiguilles et commander quelques trains et des aiguilles.
Figure 4
Exemples de TCO (source Forums)
Le premier est un TCO "classique" de réseau analogique et le second est celui de mon premier réseau digital (il est construit autour d’un Mega2560).
Dans tous les cas, l’Arduino se révélera très pratique et évolutif pour assurer les fonctions d’affichage (Leds, afficheurs, scrutation des boutons et clés, lecture de la position de potentiomètres, etc..).
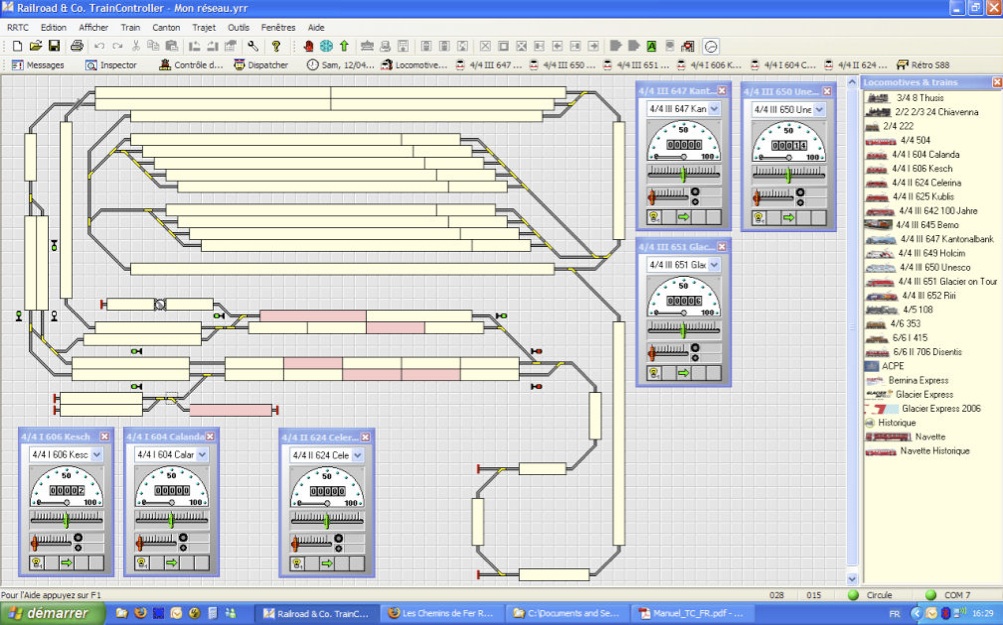
A l’opposé, certains pourraient préférer un écran d’ordinateur avec un logiciel de pilotage (RocRail, JMRI, iTrain, TrainController, Windigipet, etc..), connecté à une centrale numérique en USB ou utiliser leur tablette via une liaison WiFi.
Figure 5
Un TCO sur écran d’ordinateur (TrainController)
La rétrosignalisation
La rétrosignalisation a pour but de remonter au poste de pilotage les événements de circulation (présence ou de passage des trains à certains endroits, détection d’occupation de cantons, état des aiguilles, et bien d’autres selon la sophistication souhaitée).
Elle doit mettre en œuvre des capteurs qui font "monter" chacun un signal au moment du passage d’un train, par exemple. Tous ces "signaux" sont envoyés au poste de pilotage (vous, un Arduino, une centrale simple ou sophistiquée, un logiciel PC, etc..) pour déclencher des actions telles que :
ralentissement ou arrêt d’un train en aval d’un canton occupé par un autre train (cantonnement, bloc système),
passage des feux de circulation au rouge, jaune ou vert
fermeture d’une barrière de passage à niveau
changement de sens d’une aiguille pour permettre à un train de suivre un itinéraire programmé
déclenchement d’une annonce sonore en gare
etc..
Nous allons d’abord nous pencher sur le cas du digital, conçu pour cela, pour montrer la complexité de la question et les opportunités qu’apportent les Arduino. Ensuite, il sera facile de transposer ces solutions vers l’analogique.
Pour fédérer ces capteurs et assurer la transmission des événements vers la centrale, les constructeurs ont inventé des bus et des protocoles de communications propriétaires qui détruisent en grande partie les bienfaits de la normalisation DCC. Sans aller jusqu’à dire que c’est la foire, cela complique notre projet.
Ces réseaux se nomment "Loconet" (Digitrax, Fleishmann, Uhlenbrock, Roco, Zimo), "S88" (Märklin, ESU, Fleishmann, Tams, Uhlenbrock, Viessmann) ou "RS-feedback" (Lenz).
Mais nous verrons que l’Arduino peut être d’un grand secours dans ce domaine.
Les réseaux des manettes et accessoires
Et si cela ne suffisait pas, les constructeurs ont également inventé des bus et des protocoles de communication propriétaires (mais pas tous) pour raccorder plusieurs manettes et permettre le pilotage à plusieurs.
Figure 6
Un réseau pour les manettes (Throttle en anglais) Source dccwiki
Selon les constructeurs de centrales, ces réseaux propriétaires (échappants à la normalisation DCC) se nomment "Loconet", proche du protocole Ethernet (Digitrax, propriétaire de LocoNet, Uhlenbrock, Fleischmann) ou "Xpressnet", basé sur la norme RS485 (Lenz le créateur, Atlas, Roco, ZTC, CVP, ESU, Hornby), ou NCE Network (NCE). La partie droite de la figure 7 ci-après montre également un raccordement sans fil d’une manette, les constructeurs cités ci-dessus proposant souvent des liaisons sans fil.
Autant dire qu’il n’y a pas beaucoup de compatibilité entre les éléments d’un constructeur et ceux d’un autre, du coté des centrales et des IHM. Espérons que cette situation s’améliorera.
La norme DCC permet heureusement de libérer les choix des matériels roulants et des accessoires.
Il reste que cela impose de disposer d’autant de décodeurs que de matériels roulants et d’accessoires ou groupes d’accessoires (une commande DCC peut agir sur 8 actionneurs maximum).
A noter sur cette figure, que le réseau d’alimentation et de commande est souvent scindé en deux parties : une partie pour l’alimentation des locos, via les rails (et souvent aussi via les détecteurs de consommation de courant nécessaires au cantonnement) et une partie pour la transmission des commandes aux accessoires (aiguilles, signaux, éclairages, animations sonores, etc..), afin d’éviter les parasites inévitables sur les rails.
Le casse-tête du modéliste ferroviaire
La promesse de compatibilité entre constructeurs est ainsi mise en échec et le coût d’un système de pilotage complet digital comme analogique, basé sur des modules du commerce, peut vite s’avérer très élevé. On peut aussi se sentir « prisonnier » d’un système !
En effet, à titre d’exemple, la liste des composants d’un système digital se compose :
d’une centrale chargée de produire le signal DCC de commande en fonction de la consigne des manettes, de la rétrosignalisation, des automatismes, etc..
d’une manette pour que l’utilisateur conduise des trains, et aussi plusieurs quand viennent les copains,
d’un booster pour fournir le signal DCC de puissance (ex : +/-15V 3 à 5A) à partir du signal de commande fourni par la centrale,
d’une alimentation pour alimenter le tout en courant électrique,
d’un décodeur dans chacune des locomotives,
de décodeurs pour la commande des aiguillages,
de décodeurs pour la commande de la signalisation (feux tricolores),
de capteurs pour la détection des trains,
de circuits de gestion des boucles de retournement s’il y en a,
d’une connexion à un ordinateur, tablette, smartphone, via un routeur, en wifi,
d’autres décodeurs de commande des feux de signalisation, d’éclairages, d’animations sonores, de plaques tournantes, de passages à niveau, etc..
d’un logiciel de conduite sur PC pour gérer tous ces éléments là.
Une rapide évaluation du coût d’une configuration moyenne dépasse largement les 1000€ sans compter les rails, les locos avec leur décodeur, voitures, wagons, et les éléments de décor. Rien que pour l’électronique ! (Free-DCC, page 11)
Pour l’analogique, dans l’hypothèse d’une circulation automatique, l’apport de l’électronique sera indispensable avec la nécessité de mettre en place un câblage important ainsi que des relais mécaniques ou électroniques (en restant basique).
Et en général, tous ces utilisateurs ennuyés se retrouvent sur les Forums pour poser des questions et espérer trouver des réponses autres que "revends ton matos et achète xxx .."
Mais quel plaisir que celui de voir évoluer plusieurs trains en même temps, certains automatiquement, avec un réalisme surprenant, tout en respectant les règles de sécurité.
Alors comment faire sans se ruiner ?
La solution : Do It Yourself avec Arduino
Notre approche vise à réduire considérablement ce coût en réalisant par nous-même une grande partie des équipements ci-dessus, à partir de modules Arduino et selon une architecture plus simple qui réduit le nombre des éléments matériels, à l’exception des éléments de base conformes à la norme DCC pour le digital.
Pour l’analogique, le choix est plus grand, avec différents degrés possibles d’automatisation.
En général, deux cas possibles se présentent :
Nous possédons déjà une centrale DCC du commerce ou un système analogique et il faut s’y adapter ;
Nous n’avons aucun système et nous sommes alors libres de concevoir un système complet.
Cette 2 ème approche n’est pas nouvelle : des centrales à monter soi-même (DIY : do it yourself) existent déjà telles que (liste non exhaustive) :
Ces réalisations permettent bien de "réduire la facture", mais ne concernent pas l’Arduino qui seul nous intéresse ici et ne permettent pas ou peu de personnaliser le logiciel.
Notre approche, à base de modules Arduino et de périphériques largement disponibles dans le commerce à très bas prix, nous parait plus souple et évolutive, parce que modulaire et programmable par tous (le succès de la plateforme Arduino en atteste), dont la plupart des logiciels nécessaires proviennent de l’Open Source (logiciel libre). Comme il existe des multitudes de modules Arduino, diffusés selon le mode du "matériel libre" et de multiples bibliothèques en "logiciel libre", nous verrons qu’il est assez facile de construire sa propre plateforme soi-même, "made in home" : DIY (do it yourself).
Cette plateforme ne nécessite la réalisation d’aucun circuit imprimé et limite l’usage du fer à souder (on ne peut malheureusement pas échapper à la réalisation des câbles de liaison mais l’utilisation de borniers à vis rend la tâche plus facile). Mais, quand on peut disposer de tels circuits imprimés, cela sera tout de même un plus pour celui voudra installer en dur son matériel. On en trouve certains sur le site Locoduino.
Son avantage est l’adaptation aux évolutions. Le faible prix d’un Arduino permet d’en installer plusieurs si l’architecture et l’évolution du réseau le nécessitent. Les différents modules communiquent entre eux pour se partager les événements et les fonctions à réaliser au moyen d’un BUS de communication.
Un autre avantage est la maîtrise du logiciel, donc des fonctionnalités, leur évolutivité, tout ceci s’appuyant sur des logiciels libres largement diffusés. L’évolutivité avec la possibilité de téléverser un nouveau code dans l’Arduino augmentera ses possibilités sans pour autant toucher au câblage.
Enfin, l’avantage du DIY est que ce modèle s’applique également à un réseau analogique puisqu’on pourra s’affranchir des bus et protocoles non standards du monde digital.
Quelle architecture matérielle ?
Deux parties principales sont au cœur de cette architecture :
le générateur de signaux de puissance DCC ou analogique (un dans le cadre du DCC ou plusieurs modules dans le cadre analogique) qui orchestre l’ensemble du matériel roulant du réseau,
le gestionnaire d’accessoires qui assure la commande des accessoires et assure la collecte des événements de la rétrosignalisation, en symbiose avec le générateur selon des protocoles inter-Arduino (SPI/CAN ou I2C), plutôt que ceux du DCC, pour que ces gestionnaires trouvent leur place aussi dans les systèmes analogiques.
Autour de ces deux parties gravitent un certain nombre d’autres d’organes :
les organes d’IHM (interface homme-machine) tels que manettes, TCO, tablettes, PC avec différents types de liaisons,
les interfaces d’accessoires qui assurent l’interface entre le monde numérique des Arduino et les éléments matériels du réseau, avec des éléments largement disponibles dans le commerce, y compris d’autres Arduino si la solution est plus pratique.
Nous répétons bien que les interfaces d’accessoires ne seront pas nécessairement conformes à la norme DCC, pour décharger le bus DCC en digital et pour s’adapter aux réseaux analogiques.
Il en va de même pour les connexions des organes d’IHM tant que l’on n’utilise pas des produits du commerce.
Mais l’intégration de produits du commerce n’est pas exclue pour ceux qui en possèdent, car des circuits d’interface existent parfois et/ou seront envisagés, mais dans un second temps. Vous trouverez sur le site d’autres articles relatant ces possibilités comme Un TCO xpressnet
Que commander avec l’IHM ?
Que commande t-on à partir d’un poste de pilotage ?
les trains (locos et wagons), en DCC ou analogique,
les aiguilles avec, de préférence, des servos (solutions moins chères) ou des relais pour commander les moteurs d’aiguille du commerce,
les itinéraires (avec mode automatique ou manuel)
les feux de circulation ferroviaire, les barrières
S’il s’agit d’une manette (manette réelle ou smartphone/tablette faisant tourner une application de type "manette"), les commandes se limiteront au pilotage des trains (moteur et fonctions).
S’il s’agit d’un TCO, les commandes agiront sur les aiguilles et les animations avec un retour par la rétrosignalisation.
S’il s’agit d’un ordinateur personnel, toutes les commandes ainsi que la rétrosignalisation seront possibles. Mais le but de Locoduino n’étant pas le développement de logiciels pour PC, tablette ou smartphone, nous verrons s’il est quand même possible d’utiliser certains logiciels existants, mais dans un second temps.
On pourra même envisager le développement d’un gestionnaire de réseau complet sur Arduino !
Quelle interfaces et moyens de communication ?
Entre modules, il faut bien s’entendre. Les connexions à réaliser pourront être tout ou partie de cette liste :
l’interface avec un PC sera en USB ou sans fil en Bluetooth ou WiFi (pour la configuration et pour offrir un écran TCO, la compatibilité avec un logiciel du marché n’étant pas recherchée dans une première étape)
l’interface avec un TCO réel (optionnel, ou plusieurs) avec l’affichage de l’état du réseau (positions des aiguilles et des trains), indicateurs lumineux, boutons de commande manuelle des aiguilles, etc.. Un tel TCO sera avantageusement construit autour d’un Arduino et relié au système par I2C ou par bus CAN de préférence car plus rapide et moins sensible aux perturbations.
l’interface avec une ou plusieurs manettes de commande de train (avec ou sans fil, simple ou sophistiquée - à base de smartphone ou de tablette ou faite sur mesure / DIY)
l’interface de rétrosignalisation (détection de passage/présence des trains, reconnaissance des N°s de trains)
l’interface de commande d’aiguilles
l’interface de commande d’animations lumineuses
l’interface de commande d’animations sonores
Bien sûr cette liste n’est pas exhaustive... Tout dépend de la sophistication qui sera voulue. Pour ces dernières interfaces, le moyen de communication va découler de l’architecture qui est décrite.
Mais on sait d’ores et déjà que les moyens d’interconnexion entre Arduino (SPI/Can ou I2C principalement) sont intégrés au micro-contrôleur et sont extensibles à loisir, du fait de leur présence native et d’une documentation bien fournie.
Schémas d’architecture
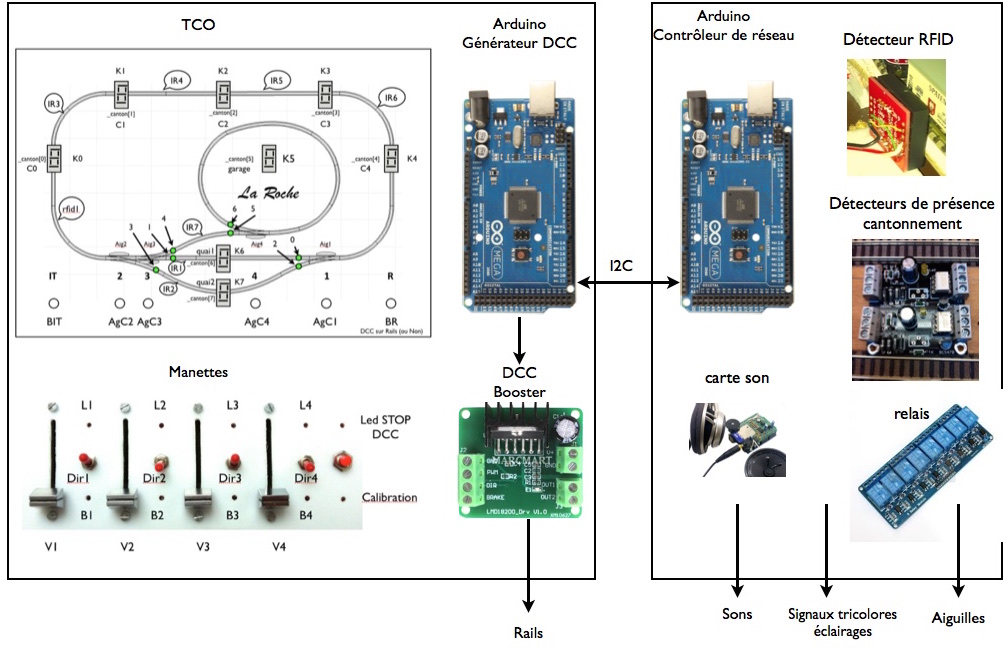
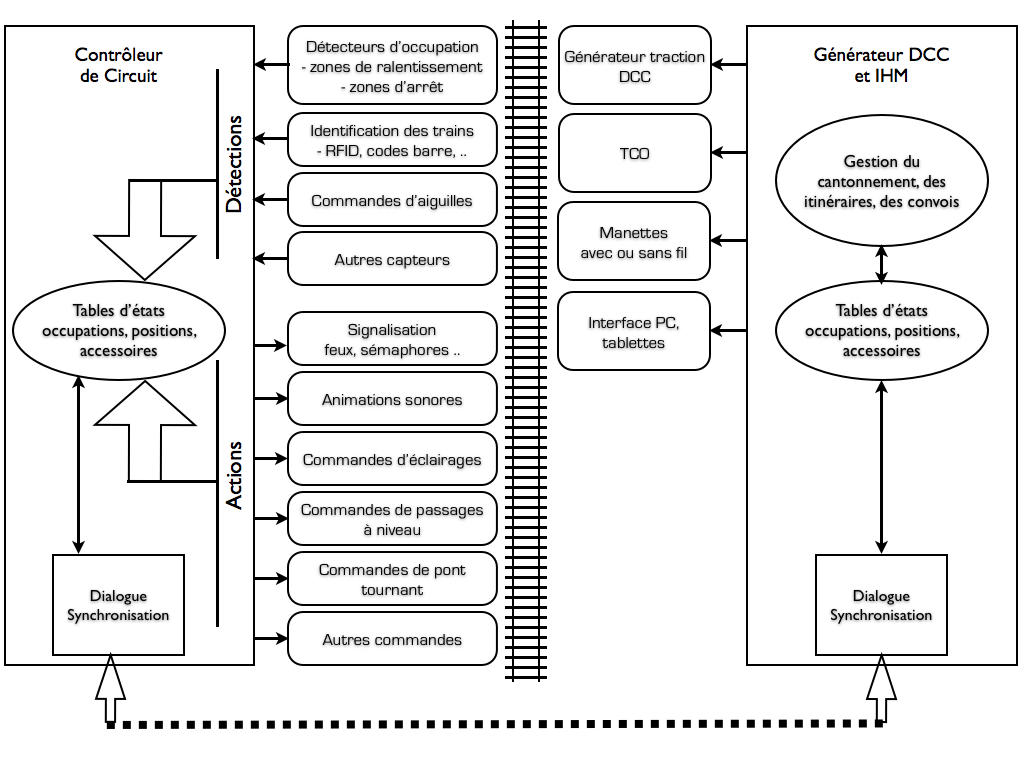
La Figure 8 représente un exemple (parmi plein d’autres) de système composé de deux parties qui coopèrent pour assurer l’ensemble des animations d’un réseau :
à gauche la génération du DCC digital ou du PWM analogique, donc le pilotage des trains et l’IHM sous forme de TCO et de curseurs de commande de vitesse ;
et à droite le contrôle du réseau, donc les accessoires, les capteurs, la rétrosignalisation, les animations.
Ces 2 parties coopèrent grâce à une liaison série rapide (ici I2C).
Figure 8
Un exemple d’architecture globale Locoduino
Le pilotage des trains requiert la génération du signal de traction. Le comportement des trains sera la résultante des actions du ou des pilotes (manettes) et des retours de signalisation (cantons ou aiguilles libres ou occupés), signaux de ralentissement, etc..
Le pilotage d’un train nécessitant, en digital, la connaissance de son adresse DCC, il est indispensable de connaitre sa position et les contraintes liées à cette position (occupation du canton suivant, sémaphore, carré ou contrainte d’itinéraire).
L’Arduino Générateur DCC recevra donc les commandes des pilotes directement et les informations de positionnement et de cantonnement par l’intermédiaire de l’Arduino Contrôleur de réseau.
Ce dernier devra s’occuper des différents capteurs (capteurs de présence, d’occupation, d’identification, d’incidents, etc..) et des différents actionneurs (aiguilles, signaux, éclairages, sons, etc..).
Tous les deux maintiendront des tableaux de variables communes qui représentent l’état du réseau et du trafic et permettent au Générateur DCC de piloter directement les trains. Le pilotage de chaque train est la résultante de plusieurs volontés : celle du pilote (moi, mes enfants, mes amis) et celles du système (sécurité, automatismes). Cela n’enlève rien au plaisir de piloter : tout au plus, nos trains ralentissent et s’arrêtent parfois, puis redémarrent, sans accident.
Figure 9
Répartition des fonctions entre les deux Arduino
L’Arduino contrôleur du circuit, à gauche, n’a pas d’interface homme-machine. Il est chargé des détections et des actions :
détections d’occupation (détection de consommation, barrières infrarouges, détecteurs à effet Hall, etc..) pour les zones de ralentissement et les zones d’arrêt de chaque canton. Ces détections servent à suivre la position des trains ;
identification des trains (capteur RFID, code barre, etc..) pour connaître les numéros de trains, grâce à laquelle le système pourra piloter les trains par leur adresse DCC ;
autres capteurs (photosensibles, par exemple, pour commander des animations de jour ou de nuit)
commandes d’aiguilles pour positionner les aiguilles en mode droit ou dévié ;
commandes des signaux (feux tricolores ou feux complexes) ;
animations sonores correspondant aux passages des trains (annonces en gare, bruits divers) ;
commandes d’éclairage (éclairage public, éclairage des bâtiments et boutiques, animations lumineuses) ;
commandes de rotondes et passages à niveau ;
autres commandes selon les contextes.
Toutes les détections et l’état des dispositifs commandés seront consignés dans une table d’états qui est mise à jour à chaque détection et chaque ordre reçu de l’Arduino générateur de traction et d’IHM.
Ce dernier dispose d’une table similaire qui sert à alimenter le générateur DCC ou de traction (ralentir un train entrant dans une zone de ralentissement, changer l’état d’une aiguille pour le passage d’un train selon un itinéraire donné, etc..) et à afficher l’état du réseau sur un TCO et/ou sur un écran informatique.
Des manettes et des boutons manipulés par les pilotes transmettent des ordres qui sont acheminés vers l’Arduino contrôleur du circuit qui les exécutera en mettant sa table à jour.
Les deux tables sont synchronisées par un protocole de communication rapide tel que l’I2C ou plutôt le CAN.
Rien n’empêche de réaliser l’Arduino contrôleur du circuit et l’Arduino générateur de traction sur des bases Arduino Mega ou DUE qui offrent un grand nombre d’entrées-sorties (70). Si ce nombre n’est pas suffisant (cas d’un grand réseau), plusieurs Arduino peuvent être connectés sur le bus. Des circuits d’extension d’entrées/sorties peuvent aussi être utilisés (registres à décalages 74HC595 pour ajouter 8 sorties par boitier ou MCP23017 pour ajouter 16 entrées/sorties par boitier - 8 maximum - via I2C).
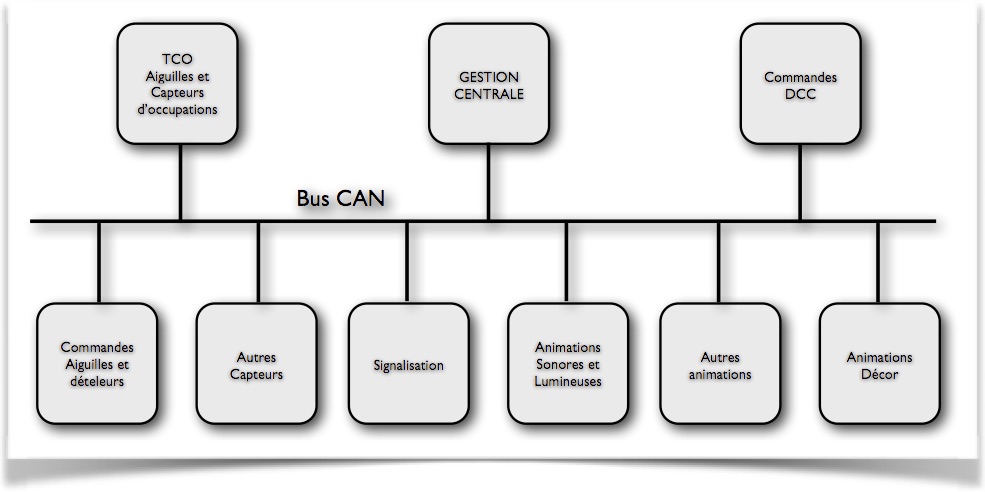
Comme indiqué au début de ce paragraphe, la répartition des fonctions dans cet exemple n’est pas la seule possible. Il serait plus évident par exemple d’associer la fonction TCO avec la connaissance de la topologie du réseau et l’état des occupations. Mais il ne faut pas oublier qu’un Arduino n’a qu’un nombre limité de ports et le découpage fonctionnel doit tenir compte des choix matériels de chacun. L’exemple plus loin éclate beaucoup plus l’architecture en modules interconnectés via un bus CAN.
Flexibilité, évolutivité
On tendra vers un système polyvalent. Petit ou grand réseau, il s’agit d’avoir la même architecture pour pouvoir l’agrandir sans changer ce qui a été fait précédemment. Dans cette optique de système polyvalent, si le réseau même petit contient bon nombre de choses, un Arduino seul ne sera pas forcément suffisant.
On notera en particulier que la transmission et la traction ne sont utilisées QUE pour commander les matériels roulants mais pas les accessoires, ce qui permet de se passer des décodeurs d’accessoires.
La technologie de communication (SPI/CAN, I2C) permettra aux Arduino de coopérer, entre eux d’une part et avec un certain nombre de périphériques d’autre part.
Figure 10
Autre répartition des fonctions entre plusieurs Arduino
Mais d’autres technologies de communication seront supportées notamment pour l’interface avec un ordinateur personnel qui supporte principalement l’USB en communication série asynchrone, le Bluetooth ou le Wifi pour le sans fil.
Compatibilité avec des modules existants
La possibilité de réaliser un système de pilotage 100% à base d’Arduino existe bien réellement et nous espérons que Locoduino vous y conduira progressivement. Mais, dans la pratique, beaucoup de modélistes voudront réutiliser certains dispositifs qu’ils possèdent déjà.
L’Arduino contrôleur du circuit pourrait, par exemple, générer le signal de rétrosignalisation du protocole S88 pour s’interfacer avec une centrale existante.
Un décodeur d’accessoires à base d’Arduino peut aussi trouver sa place dans un système comprenant un logiciel de pilotage sur PC et une centrale DCC.
Le générateur DCC pourrait être remplacé par un système de pilotage analogique.
D’autres combinaisons seront décrites dans d’autres articles.
De ces généralités découleront des projets spécifiques que vous aurez loisir de découvrir prochainement sur Locoduino !
Quelques exemples de choix d’implémentation grâce aux bibliothèques existantes et fiables
L’Arduino est relié aux rails via un booster et commande les trains par la librairie CmrdArduino.
Les aiguilles sont commandées via des servos par la librairie servo, mais aussi via des relais pour les moteurs d’aiguillage à impulsion.
Les Leds des feux de signalisation et des éclairages sont commandées via un étage de puissance puisque l’Arduino ne sera pas à même de fournir l’ampérage nécessaire en général.
Visitez le Forum Locoduino pour participer aux échanges sur nos expériences personnelles
On y parle des tables qui décrivent la structure du réseau (cantons, aiguilles), les itinéraires, les trains, les animations. On y parle aussi d’architecture matérielle.
Vers une gestion logicielle complète de notre réseau sans logiciel PC ? Oui tout peut-être dans les Arduino !
Mais il est bon d’y penser dès le départ.
Il y aura donc des suites à cet article...
Avertissement et conclusions
De ces concepts découleront des programmes qui ne correspondront pas forcément au réseau que vous possédez, mais ce site vous aidera à les adapter. Les différents articles qui suivront expliqueront la marche à suivre, mais une connaissance minimum de l’environnement de programmation (IDE) et du langage seront nécessaires. Comprendre vous permettra aussi de vous sortir d’un bug intempestif ou récalcitrant. Ces connaissances, Locoduino peut vous aider à les acquérir grâce aux nombreux articles sur la programmation ou le matériel.
merci pour ce synopsis si ouvert sur toutes les possibilités de gestion de nos réseaux.
N’iste avec un matériel roulant ancien, j’ai du mal a envisager le passage au numérique. Par contre suivant de prés les développements d’Arduino, j’ai l’impression que l’analogique peut avoir de très beaux jours devant lui.
Je vous suis avec "passion"depuis les premiers articles sur LR.
Merci de continuer à nous régaler de ces nouvelles possibilités.
Bern 69
Je pense que vous ne serez pas déçu avec les articles à venir. Mais n’hésitez pas à nous faire part des projets qui vous intéresseraient.
Personnellement, j’ai aussi du matériel ancien en N que je digitalise progressivement. Mais ça n’est pas toujours facile. Aussi je garde une partie de mon réseau en analogique.
Comme il est possible de faire une centrale supportant les deux modes, pourquoi se priver ?
Un ami a un enfant handicapé ayant donc des difficultés pour manipuler un commande de train.
il a un reseau hyper simple avec une centrale et une commande multimaus.
Je souhaite savoir s’il est possible de realiser une commande marche avant stop arriere grace a Arduino.
L’enfant étant capable de mouvement brusques et parfois incontrolé, nous souhaitons fabriquer une commande solide avec un gros levier ou curseur !
Je pense que si vous voulez remplacer une Multimaus par un Arduino, c’est compliqué (exemple sur ce site allemand : http://pgahtow.de/wiki/index.php?ti...).
Mais n’ayant pas expérimenté cette option, je ne peux vous le garantir.
Je pense que vous auriez peut-être moins de travail en réalisant une petite centrale comme expliqué dans cet article : http://www.locoduino.org/spip.php?a...
Dans ce cas vous pourriez la simplifier au strict nécessaire. On pourrait aussi vous aider un peu. Quel est votre niveau en électronique et en Arduino ?
j’ai des notions et d’electronique et d’Arduino. je sais souder, meme des CMS. Je suis un passionné d’aeromodelisme.
Dans le cas de ce train, il est deja equipé d’une centrale avec une commande multimaus. Cette centrale a une deuxieme prise (RJ45 ?) pour y mettre une deuxieme commande.
L’idee est de fabriquer une commande grosse et robuste avec un levier pour la marche avant arriere d’un train, et quelques boutons pour la lumiere du train et 2 aiguillages.
Cette commande se brancherait a la centrale existente a coté de la Multimaus.
Rien de plus.
Si cela parait plus simple de creer une centrale simplifiée Arduino, pourquoi pas.
C’est la ou votre experience pourra me donner des pistes a explorer.
Il s’agit ici de faire jouer un enfant dont les mouvements sont vraiments difficiles !
Merci pour les liens !
En plus, ce serait une 2ème multimaus (fonctionnement différent de la 1ère).
En fait, s’il s’agit seulement de mettre entre les mains de l’enfant un curseur de vitesse solide et quelques boutons, vous pouvez peut-être bricoler une multimaus du commerce (on en trouve à 60€ chez DM Toys en ce moment) ou d’occasion sur un site ad hoc.
Vous pouvez tenter de "déporter" les organes de commande choisis au bout d’un câble pas trop long, dans un boitier solide et ergonomique, en conservant la multimaus, son électronique et son logiciel.
Je vois que c’est bien plus complexe qu’esperé....
le plus simple semble effectivement de modifier une multimaus en deportant le potenciometre et quelques boutons. l’autre option de creer une centrale avec une carte arduino et un LMD1800 semble aussi assez simple vu la faible complexité du reseau considéré.
Je pense avoir trouvé peut etre exactement ce que je cherche !!!!
cela semble fonctionner avec un ARDUINO UNO tout simple (que j’ai en stock), et un simple composant MAX485 (3 euros livré de puis l’espagne ou j’habite) plus qu’a attendre quelques jours pour commencer les essais.
au debut aucun resultat. JE branchait mon ensemble sur la prise "Master"de la centrale de mon ami... mais rien ne bougeait.
finalement, en laissant sa Multimaus sur le Master, et en branchant mon systeme sur le Slave, cela a marché !!!
la seule chose que j’ai du faire, c’est d’inverser les fil A et B (signaux allant vers la centrale), car j’avais lu quelque part que des gens avaient eu besoin de cela pour que ca marche !
mon montage actuel est fait sur une plaque d’essai avec une simple "arduino NANO" 328P 5V a 6 euros, et le module MAX445 a a 2 euros !
il reste a trouver des interrupteurs qui soient plus ergonomiques pour le fils de mon ami. afin qu’il puisse profiter de son train ! Et la tout est possible !
il reste de nombreux essais et quelques modifications, notamment l’alimentation de l’arduino par les 12V de la centrale....
et pourquoi pas commander des aiguillages
Reliez ensuite la sortie 9 V sur la broche Vin de l’Arduino.
Je vous propose de m’adresser une description de votre réalisation et d’écrire ensemble un article sur Locoduino, pour permettre a d’autres modélistes de profiter de cette belle initiative.
l’arduino Nano accepte 6 a 12V pour son alimentation (voltage recommandé), et meme de 6 a 20V pour le voltage limite !
il ne devrait donc pas avoir de probleme.
lorsque j’aurais fait quelques progres, je ferais des photos et un texte que vous pourrez modifier comme vous voudrez.
sur cette photo, il manque l’interrupteur pour ARRIERE/ STOP / AVANT et le potar 10K pour le reglage de la vitesse !
J’ai aussi remarqué que si je coupe l’alimentation de l’arduino, le train continue sans broncher ! meme si c’est peut etre un peu risqué, on doit pouvoir changer l’ID de la loco qu’on veut piloter avec un Inter, et piloter plusieurs trains !
helas, ce n’est pas du tout mon objectif pour le moment.... juste faire un "poste de pilotage" TRES solide et surtout ergonomique pour un enfant handicapé.
Le régulateur embarqué dans l’Arduino va transformer en chaleur les 12-5=7v x l’intensité du montage complet y compris le Max485. Je n’ai pas fait le calcul précis, mais 12v est certainement un grand maximum.
Adjoindre un 7809 n’est qu’un conseil qui va dans le sens de la solidité pour une fraction d’€.
Je pense que l’Arduino doit envoyer une commande d’arrêt avant la coupure du courant.
Normalement il faut couper le DCC sur les rails avant d’arrêter l’Arduino, sinon vos loco ne le savent pas et continuent de rouler ou risquent de partir inopinément au démarrage suivant.
Pour changer de loco, cela dépend des possibilités offertes par la bibliothèque "NOR_XpressNet_Throttle".
Merci pour les conseils... Il y a quand meme de la marge avec le regulateur d’un arduinoNano.le MAX485 ne consommant que des micros Amperes en theorie... mais vous avez surement raison.
pour mes coupures de tensions de l’arduino, effectivement, la loco continue jusqu’a la presence d’un contre ordre.
Mais ca peut etre interessant d’ajouter un bouton d’arret total, si on veut jouer avec plusieurs locos en meme temps....
tres sympa le monde des possibilités d’un train electrique.... c’est juste infini !
La loco fera ce que vous aurez prévu dans votre code. Personnellement je mets la vitesse à zéro et il faut ramener la manette de vitesse à zéro pour pouvoir démarrer.
C’est aussi ce que je fais pour le changement de sens : le changement effectif n’est exécuté qu’à partir du moment ou la vitesse est ramenée à zéro.
la règle est qu’il faut éliminer tous les comportements imprévus ;)
Personnellement, je ne cherche pas à utiliser TrainController dans mes projets Arduino.
Mais votre question est pertinente si vous disposez de ce logiciel. Pour vous répondre j’aimerai connaître plus précisément ce logiciel et ses interfaces. Pouvez-vous nous donner des indications d’après la notice de TrainController.
Il est fort probable qu’il soit possible de développer une interface compatible TrainController sur Arduino, si elle n’existe pas déjà.
Vous avez compris que le sujet est vaste et les cas de figure nombreux. Aussi il serait intéressant de préciser ce que vous souhaiteriez.
Le logiciel de supervision permet la commande automatique d’un réseau (itinéraires, ...). Il utilise des interfaces plus ou moins standards (commerciaux ou libres) pour communiquer avec la centrale digitale. Celle-ci peut donc rester élémentaire. Les logiciels les plus courants sont windigipet, itrain, traincontroller, rocrail, ....
Voici la liste des interfaces pour train controller : http://www.freiwald.com/pages/hardw...
Pour un système relativement simple composé de MS2 et arduino (partageant le même bus CAN) et la gleisbox de Marklin, la connexion vers un PC peut se faire via le module suivant : http://can-digital-bahn.com/modul.p... (le protocole sur le CAN bus est disponible aussi via cette page web). Ce module pourrait être facilement composé par un arduino et son shield Can bus. Le module CC schnitte reste relativement cher par rapport à la structure arduino.
Encore faut-il le programmer et choisir l’interface adéquat.
Il y a 3 grandes approches possibles pour "superviser" un modèle réduit de réseau ferroviaire :
on commence par acheter une centrale (Multimaus, ECOS, Z21, SPROG3, MS2, etc..) puis on ajoute le "superviseur" (JMRI, ROCRAIL, RRTC, ou autres Tablettes et smartphones), avec aussi l’intégration de la rétrosignalisation.
on choisit le superviseur (RRTC dans votre cas) et on ajoute ensuite la centrale, en se posant la question de "pourquoi pas en Arduino" : j’avoue que je n’avais pas pensé à ce cas ! Ou alors vous êtes parti avec un centrale minimale (type CS2) et vous voulez monter en gamme en DIY.
on laisse tomber les produits du commerce et on construit son système ce qui permet de comprendre comment il fonctionne et permet de le personnaliser à loisir (c’est la solution que j’ai choisie)
Puisque vous êtes dans le 2ème cas, que peut-on faire ?
Une centrale à base d’Arduino, capable de communiquer avec un PC dans lequel tourne RRTC, en mode série (ou USB ce qui est la même chose avec les adaptateurs USB-série) ?
La réponse est OUI évidemment à condition de savoir reconnaitre, dans votre programme Arduino, les chaines de caractères qui représentent chaque commande de RRTC et ensuite de les exécuter sous forme de commandes DCC.
C’est exactement ce que font les centrales du commerce dont la plus simple à mettre en oeuvre est la SPROG3.
On trouve ce type de centrale à moins de 100€ ce qui peut-être insuffisant pour décider de se lancer dans un projet Arduino.
Je me suis penché sur la question il y a plusieurs mois quand je commençais à imaginer mon nouveau réseau. J’avoue que j’ai rapidement décidé de limiter l’usage du DCC aux seules commandes qui ne peuvent s’en passer (les commandes destinées aux décodeurs des machines roulantes) et d’utiliser un autre architecture que vous pouvez lire sur ce site. Dans ces conditions, une centrale Arduino se justifie mieux.
Concrètement Locoduino ne peut pas vous proposer aujourd’hui de projet utilisable pour s’interfacer avec TrainController
Mais c’est une graine qui commence à germer et qui devrait éclore dans les mois à venir, par curiosité en tout cas.
Nous avons une piste à explorer : celle du projet DCCplusplus qui utilise un langage de commande particulier entre une partie centrale Arduino et une partie PC avec Processing.
La partie centrale peut être développée différemment selon vos propres besoins et le langage de commande peut être modifié de façon à être conforme à celui de RRTC.
Mais c’est une piste qui demande du temps.
Nous serions intéressés par votre avis sur cette piste, ou une autre ...
Le réseau 3 rails implanté dans notre club est architecturé sur 2 arduino, une MS2. Un exposé a été fait dernièrement : http://cfc.hebfree.org/fichiers/RAI...
Le souci maintenant est de trouver l’interface vers un logiciel de supervision (comme CC Schnitte 2.1 vers Itrain ou Traincontroller ou autre )
Sera testé prochainement la configuration suivante :
un module commercial bon marché canbus/USB associé à un driver Gbox2Eth.
Au niveau de la supervision, l’interface à sélectionner est MARKLIN CS2
En effet Gbox2ETh émule la communication vers le PC et finalement l’arduino, le reste de la centrale.
Si on reste strictement en DCC, un module comme le DR5000 de digirails
(www.digirails.com ou www.digikeijs.com) reste le maitre achat car il comprend toues les pincipaux interfaces.
Evidemment, il n’y a plus rien à développer dans ce cas.
Mon avis est que l’arduino doit émuler une centrale simple aux fonctions basiques mais doit pouvoir s’interfacer avec d’autres logiciels et ne pas créer un monde fermé. Toute la gestion du réseau est laissée à la supervision.
Bien d’autres solutions (aussi valables) peuvent être immginées pour gérer un réseau ferroviaire.
Je vous tiendrai au courant des essais effectués.
La solution CC Schnitte revient à 150 Eur. Celle que nous testerons à 20 Eur.
Bonjour
J’aimerais avoir votre avis sur la manière la plus économique pour installer un bus CAN reliant un grand nombre d’Arduino (un par canton).
Merci
Je voudrai savoir, si avec un arduino et JMRI, on peux utiliser avec la central Lenz et les cartes de RS8 ldt, en parallèle de du logiciel train controller sans modifier l’installation en cours.
Sachant que l’arduino et JMRI sera utiliser quand la personne qui gére ce réseau avec TC ne sera pas présent et pas en même temps. car la personne qui à mis en place l’informatisation du réseau à passer beaucoup d’heures pour avoir de bon paramètres et que le réseau est fonctionnel. Que je ne voudrai pas changer les paramètre qu’il à mis en place. Quand il va vouloir utiliser TC qui’il y a pas de confit.
Matériel utilisé :
Lenz set 100
LS 150
RS8 LDT
moteur conrad
moteur roco
interface Li usb lenz
Merci de votre réponse, ils veulent utiliser un arduino et jmri qui remplacera train controller quand la personne qui sais l’utiliser n’ai pas la. je voulais savoir si c’est y’aura des confis ou non.
Bon, et bien OUI il y aura des "confis" ou des "confits", il vaut mieux ne pas vous lancer dans cette aventure si vous ne savez pas mieux décrire la situation (pour savoir s’il y aurait des conflits, entre autres).
Merci pour votre humour et cette gâterie de fin d’année.
Je pensais avoir donné assez de détails. Avec l’arduino et jmri peux ton faire de la rétrosignalisation sans utiliser le logiciel train controller. Car je ne trouve pas cette info qui peux me servir. désoler pour les fautes de français
Des détails il en faut beaucoup plus car c’est très flou tout ça.
J’imagine que la communication avec la centrale se fait via XPressNet ? (ou pas ?). Oui on peut discuter en XPressNet avec un Arduino, voir « Un TCO xpressnet ».
Ensuite je ne vois pas où JMRI s’insère dans le cas d’un Arduino car, à ce que je compris, mais je peux me tromper, JMRI est un logiciel tournant sur le PC qui permet d’interfacer un logiciel de contrôle comme TC avec le matériel causant XPressNet. JMRI n’a donc pas d’existence si vous n’utilisez pas un PC.
Jean-Luc a raison : c’est trop flou. Pourtant sur Locoduino vous avez plusieurs articles qui vous expliquent les architectures dont celui-ci.
J’imagine que vous souhaitez pouvoir utiliser 2 types de logiciel PC : RRTC et JMRI, l’un ou l’autre mais pas les 2 en même temps. Apparemment avec la même centrale Lenz et les même capteurs de retrosignalisation LDT.
A priori c’est comme lancer le logiciel RRTC ou JMRI, le PC étant raccordé à la centrale par un câble USB ou Ethernet. Dans ce cas votre problème ne nous concerne pas et il faut aller sur les forums RRTC et JMRI.
Je ne vois pas du tout ce que viendrait faire l’Arduino la dedans.
Peut-être avez-vous lu quelque part une association entre Arduino et JMRI. Oui elle existe pour le logiciel DCC++ qui est une centrale à part entière. Dans ce cas il est impossible de partager le câblage du réseau pour RRTC+Lenz et pour DCC++.
D’où ma réponse OUI il y a du confit dans le repas de réveillon et du conflit dans votre projet.
Vous comprenez maintenant pourquoi on vous demande plus de détails et un schéma. Je pense que votre ami qui a mis au point RRTC ne vous laisserait pas faire.
Bon réveillon et bonne année 2017.
Bonjour
J’étudie le pilotage de locos LGB via Arduino avec une carte par bloc...
En PWM ça pose des problèmes de synchronisation... j’aimerais piloter en DC pur (un peu comme faisait DR)... quel serait le circuit le plus approprié pour réaliser ça ?
Merci pour vos excellents articles
Roland
Exact... mais dans les deux cas on est en PWM...
Ca me rappelle une très mauvaise expérience en 1971, en N, avec la télécommande Jouef...
Les moteurs grillaient les uns après les autres...
Par ailleurs, même DR a prévu le DC pur pour LGB... sans raison ?
Donc... pas de PWM, mais du DC pur... un LM338 commandé devrait faire l’affaire...
et... plus de problème de synchro de PWM ;)
Reste à trouver le schéma et à tester ça...
Keep It Simple & Stupid
Je ne pense pas que ça fera l’affaire. Lorsqu’une loco sera à cheval sur deux cantons, les sorties des régulateurs seront reliées. Les tensions n’étant pas tout à fait identiques, l’un va pomper le jus de l’autre, chacun tentant d’imposer SA tension, et ça va chauffer.
Peut-être... peut-être pas...
1. je vu un schéma ou 4 LM338 fonctionnaient en parallèle pour débiter 20A...
2. en RC j’utilise une double alimentation à partir de deux sources qui ne sont pas nécessairement au même niveau... séparées par diode schottky... la plus élevée l’emporte sur l’autre...
En tout cas, ce point mérite d’être validé.
Merci
Je vous remercie d’ouvrir un fil sur le Forum, dans la rubrique Vos Projets pour exposer les différents stades de votre réflexion sur ce sujet d’alimentation DC avec un Arduino par canton.
Ici il vaut mieux réserver l’espace qui est sous un article à des sujets connexes et complémentaires, de préférence sous forme de réalisation complète et testée ou des questions destinées à éclairer un point particulier de l’article.
Le but est d’apprendre quelque chose de plus à nos lecteurs.
Je vous laisse transporter votre sujet sur le forum et j’effacerai les contributions inutiles ensuite.
Rien n’empêchera, plus tard, de poster une contribution sur votre solution ici quand vous l’aurez maitrisée.
Bonjour,
J’ai 50 ans, je suis de Poitiers et en arrêt depuis onze mois pour anxiété et dépression suite à un burnout. J’ai pu faire une analyse avec un encadrement médical et il s’avère que plein de taches noires ont fait en sorte que le 19 Décembre 2016 un gros nuage noir m’a mis dans l’obscurité....
Bref dans ces petites taches noires acquises au fil des années il y en a une qui vient de ma plus tendre enfance, notamment le "Jouef" de mon enfance.
Chez mon grand père, je passais des heures alors sur la pointe des pieds les yeux à peine plus hauts que la table, à contempler le petit train électrique monté au fil des années par un oncle qui était parti.
J’ai pu jouer quelques années plus tard avec une partie de ce petit train mis au rébut dans le grenier car il avait été démonté. En parallèle tout petit, mon père avait monté un circuit qui a enchanté mes vacances de Noël, et, lorsque j’ai eu l’âge de prendre les commandes c’est moi qui en suis devenu le chef de gare en assurant le montage à chaque fin d’année. Et la vie passe. Pour la naissance de mon premier garçon, j’ai voulu perpétuer la tradition et acheter un coffret pour Noël. Je l’ai monté une seule fois car ma femme n’appréciait pas vraiment de voir ce petit train sur un tapis du salon autour du sapin.... frustration. Et la vie passe encore, passant plus de temps au travail à me ruiner la santé. Le petit train est retourné dans une boite en carton....
Depuis quelques mois, ça me travaille, ce petit train de mon enfance, mais étant fâché avec mon père, difficile de récupérer mon petit "Jouef" de ma tendre enfance, j’ai pris sur moi et je suis allé récupérer le train de mon grand-père dont deux locos avait était achetées pour ma naissance. Hélas je n’en ai récupéré qu’une seule, mais avec les voies, et je suis en « train » de faire un aménagement dans mon garage pour le vider complètement, l’isoler et pouvoir enfin faire un diorama.
Alors en parallèle je m’essaies à faire des tests de texture pour divers décors et essaies de récupérer le plus de choses possible, n’étant pas très fortuné voir un peu dans le rouge en ce moment (pas besoin de dépenser trop d’argent), j’ai même fait un appel aux dons sur Facebook ou j’ai posté hier mon premier diorama test (https://www.facebook.com/profile.ph...) et si vous allez sur ma page perso "Mes Humeurs" vous y lirez des choses personnelles et plus sombres (https://www.facebook.com/laulo86/ ).
Je viens de commander un Arduino UNO , j’ai la boite devant moi, s’il vous plaît aider-moi à retrouver mon petit "Jouef "d’enfance, je suis perdu.
Merci d’avance.
Cordialement
Laurent PENOT
mail : laurent.pe67@gmail.com
Nous sommes convaincus comme vous du bienfait du modélisme ferroviaire sur tout un chacun et en particulier les personnes en détresse comme vous.
Mais ce n’est pas la bonne place pour en parler si vous voulez de bons échanges et je vous invite à ouvrir un sujet sur le forum en expliquant ce que vous souhaitez faire avec l’Arduino.
Vous pouvez faire un copier-coller de votre contribution ci-dessus que j’ai remise en forme pour vous aider.
En parallèle, je vous conseille de rejoindre un club de modélisme ferroviaire à Poitiers (Ferrovienne par exemple) où, en expliquant bien votre situation, il devrait être possible d’acquérir du matériel à prix intéressant, car il arrive que des épouses de modélistes confient le réseau de leur mari décédé au club du coin.
Vous y trouverez aussi un accueil qui vous fera du bien.
Excellent article de vulgarisation qui donne vraiment envie de se lancer... Ce que je vais faire même étant néophyte. Par contre, je ne trouve pas d’article permettant de fabriquer un décodeur pour locomotive recevant les instructions DCC. existe-t-il sur LOCODUINO ?
Bien cordialement
Pascal
Si, il existe des articles concernant les décodeurs DCC, dans les articles et surtout dans le forum. Mais plutôt que vous donner des liens directs, il ne faut pas oublier la miniaturation nécessaire des décodeurs pour les petites échelles Z, N et HO, d’autant qu’on trouve quantités de décodeurs des 15€ (Laisdcc) ou 25 a 35€ pour les marques.
Par contre, à partir de l’echelle 0 où il y a plus de place pour un grand décodeur, oui une realisation à base d’Arduino est possible. Mais ce n’est pas un projet simple pour débutant.




{kind=link}