Depuis le premier article, notre passage à niveau a bien évolué et il joue pleinement son rôle en retenant la circulation routière lorsqu’un train passe. Il lui manque pourtant un élément que nous allons rajouter aujourd’hui : la sonnerie. Nous utiliserons un lecteur DFPlayer Mini pour reproduire le son comme nous l’avions fait dans l’article Annonces en gare avec la RFID.
Passage à niveau géré par Arduino
Passage à niveau géré par Arduino (4)
La sonnerie
.
Par :
DIFFICULTÉ :★★☆
Nous vous renvoyons donc vers cet article pour plus de détails sur le lecteur et la façon de le mettre en œuvre puisque nous nous sommes inspirés du montage de cet article pour réaliser la partie son de notre PN.
La figure 1 montre comment relier le DFPlayer à la carte Arduino ; il est alimenté en 5 V et deux fils seulement sont utilisés pour faire la liaison avec la carte Arduino (les sorties 10 et 11) grâce à la bibliothèque SoftwareSerial qui fait partie de l’IDE d’Arduino. Le son est produit par un petit haut-parleur de 3 W maximum mais il est possible d’utiliser une paire d’enceintes pour ceux qui veulent la stéréo. Pour reproduire la sonnerie du PN, il suffit de lire un fichier son au format MP3 stocké sur une carte micro-SD.

- Figure 1
- Raccordement du Player à une carte Uno (extraite du site de DFRobot)

Ce lecteur a besoin de la bibliothèque DFRobotDFPlayerMini qui devra donc être installée dans l’IDE : on la trouve grâce au gestionnaire de bibliothèque.
L’idée première était donc de rajouter ce montage sur le montage de notre PN puisque les sorties 10 et 11 ne sont pas utilisées, mais ceci perturbait la fréquence de clignotement des feux de PN. Un remplacement des sorties 10 et 11 par les sorties 7 et 12, non utilisées et ne donnant pas de PWM n’y fit rien ; visiblement nous étions face à une incompatibilité entre les bibliothèques utilisées. Vu que le prix d’une carte Uno est aujourd’hui dérisoire, nous avons adopté comme solution de déporter la fonction son sur une deuxième carte Uno, commandée par la première. Cette solution a aussi l’avantage d’une maintenance plus facile : on peut perdre la fonction son sans pour autant perdre tout le PN. De plus, ce module son, constitué d’une carte Uno (ou Nano) et d’un DFPlayer Mini, peut être utilisé pour jouer d’autres ambiances sonores (un train qui siffle à l’entrée d’un tunnel pour prévenir d’éventuels ouvriers, des annonces en gare, etc.), mais il faut se rappeler qu’il est impossible de jouer plusieurs fichiers son en même temps ! Enfin, un autre avantage est que ce module son peut être remplacé par un module déjà en votre possession comme le module sonore Séries 100 ou 200 d’AVT Products (en vente chez LR-Modélisme).
Modification du programme de PN
Nous allons donc utiliser la sortie 7 pour créer une sortie son qui commande la carte son par son état haut. Pour la mise au point du programme, une simple LED permet de contrôler à quel moment cette sortie est active à l’état haut. En fait, la sonnerie doit retentir depuis le début du clignotement des feux de PN jusqu’à la fin du mouvement fermant les barrières. En dehors de cette phase, la sonnerie ne doit jamais être active.
On introduit une variable booléenne appelée etatSon qui vaut false si le son n’est pas commandé (sortie 7 à l’état bas) et qui vaut true si le son est commandé (sortie 7 à l’état haut). La sortie 7 commandera ultérieurement la carte son par l’intermédiaire d’un coupleur optique. C’est assez facile de mettre etatSon à false lorsqu’ etatZone est également false (zone non occupée). Par contre, lorsque la zone est occupée (etatZone = true), etatSon devient égale à true puis redevient égale à false dès que le mouvement des barrières est terminé. L’état de la sortie 7 est mis à jour à chaque itération de la fonction loop() en fonction de la valeur etatSon.
Voici donc le nouveau programme :
/*******************************************************************************
* PN_TIB_FeuBarrieresAttente_InitFerme_SortieSon.ino
* *****************************************************************************
* Programme developpe pour le projet de PN pour Train In Box.
* Il prend en compte l arrivee du train, le clignotement des feux en simulant
* une ampoule a filaments, un delai de 0 a 8 secondes avant mouvement des
* barrieres, le mouvements des deux barrieres sur 90° d amplitude (depend de
* la transmission adoptee).
* Le programme s'initialise barrieres fermees, donc AVEC TRAIN EN GARE SUR TIB.
* La LED_SON est allumee tant que sonnerie doit jouer ; cette sortie commande
* le module sonore.
* *****************************************************************************
* Christian BEZANGER - 13 Novembre 2018 - 2 Juin 2019 - 29 mai 2020
******************************************************************************/
#include <LightDimmer.h> // Bibliotheque pour gerer les feux du PN
#include <Servo.h> // Bibliotheque pour gerer les barrieres du PN
const byte ILS=2; // entree des capteurs
const byte LED=6; // sortie PWM des feux du PN
const byte LED_SON=7; // sortie pour indiquer sonnerie
const byte S1=4; // sortie pour le servomoteur 1
const byte S2=8; // sortie pour le servomoteur 2
unsigned int compteur = 1; // compteur d evenements (survol ILS)
// Variables utilisateur pour reglage du mouvement des barrieres
// -------------------------------------------------------------
unsigned long delaiFermeture = 0; // Regle le delai entre clignotement LED
// et fermeture barrieres - entre 2000 et 8000 mais 0 sur TIB (pas de delai)
int speedServo = 30; // Regle la vitesse de mouvement des barrieres
// Variables non utilisateur
// -------------------------
volatile static boolean etatZonePN = true; // true si la zone du PN est occupee
volatile static boolean old_etatZonePN = false; // etat anterieur de la zone
volatile static unsigned long old_top_debutISR; // Date anterieure d appel ISR
unsigned long old_top = 0; // variable pour afficher donnees utiles
int posServo = 90; // position courante a initialiser imperativement FERMEE
int posOuvert = 0; // barriere a la verticale
int posFerme = 90; // barriere a l'horizontale (90° de la verticale)
unsigned long topAttente = 0; // top pris au début franchissement de la zone PN
boolean etatSon = false; // true si sonnerie doit retentir
// Instanciations
LightDimmer feuPN;
Servo servo1;
Servo servo2;
void changeEtat() { // routine d'interruption (ISR)
unsigned long top_debutISR = millis(); // date appel ISR
if((top_debutISR - old_top_debutISR) > 2000) {
// 2 secondes au moins entre execution ISR
etatZonePN = !etatZonePN; // etat passe a etat oppose
old_top_debutISR = top_debutISR; // initialisation date anterieure d appel ISR
}
} // fin de ISR
void setup() {
// put your setup code here, to run once:
Serial.begin(115200); // communication avec le moniteur
pinMode (ILS, INPUT_PULLUP); // entree capteur
pinMode (LED_BUILTIN, OUTPUT); // LED du module allumee si Zone PN occupee
pinMode (LED, OUTPUT); // sortie pour feux du PN
pinMode (LED_SON, OUTPUT);
attachInterrupt (digitalPinToInterrupt(ILS), changeEtat, FALLING);
digitalWrite (LED_BUILTIN, LOW);
feuPN.begin(LED, HIGH); // LED s'allume avec etat haut
servo1.attach(S1);
servo2.attach(S2);
// initialisation des barrieres en position fermee
servo1.write(posFerme); // barriere 1 FERMEE apres initialisation
servo2.write(posFerme); // barriere 2 FERMEE apres initialisation
delay(2000);
digitalWrite (LED_BUILTIN, HIGH); // Indique fin de setup
} // fin de setup
void loop() {
// put your main code here, to run repeatedly:
if(etatSon == false) {digitalWrite (LED_SON, LOW);}
if(etatSon == true) {digitalWrite (LED_SON, HIGH);}
if(etatZonePN == false) {
old_etatZonePN = etatZonePN;
digitalWrite (LED_BUILTIN, LOW); // eteint LED de controle de la zone PN
etatSon = false; // pas de sonnerie
feuPN.stopBlink(); // arrete le clignotement
feuPN.off(); // eteint les feux
// ouverture barriere
if(posServo > posOuvert) {
posServo = posServo - 1;
servo1.write(posServo);
servo2.write(posServo);
delay(speedServo);
} // fin du test sur position des servos
} // fin du test sur etat de la Zone du PN -> false
if(etatZonePN == true) {
if(etatZonePN != old_etatZonePN) {
topAttente = millis(); // prend un top d'entree dans zone PN
old_etatZonePN = etatZonePN;
etatSon = true; // sonnerie
} // fin du deuxieme if
digitalWrite (LED_BUILTIN, HIGH); // allume LED de controle de la zone PN
feuPN.startBlink(); // commence le clignotement
// fermeture barriere après attente
if(millis() - topAttente > delaiFermeture) {
if(posServo <= posFerme) {
posServo = posServo + 1;
servo1.write(posServo);
servo2.write(posServo);
if(posServo >= 89) {etatSon = false;}
delay(speedServo);
} // fin du test sur position des servos
} // fin du test sur delai avant ouverture
} // fin du test sur etat de la Zone du PN -> true
LightDimmer::update();
if(old_top_debutISR != old_top) { // Affichage pour chaque nouveau survol ILS
Serial.print(compteur);
Serial.print(" ");
Serial.print(old_top_debutISR);
Serial.print(" ");
Serial.println(old_top_debutISR - old_top);
old_top = old_top_debutISR;
compteur = compteur + 1;
}
} // fin de loopDans ce nouveau programme, à la ligne 28, la variabledelaiFermeturequi règle le délai entre le début de clignotement des feux et le début de mouvement de fermeture des barrières, est initialisée à 0 car ce programme est livré pour le réseau TIB qui est un petit réseau. Pour un réseau avec de grands cantons, ce délai peut être réglé entre 2 et 8 secondes, ce dernier chiffre correspondant à la réalité. N’oubliez pas de régler cette variable en fonction des caractéristiques de votre réseau.
Montage avec le module son
La figure 2 montre comment raccorder notre module son à la carte de commande du passage à niveau.

- Figure 2
- Raccordement du module son à la carte de commande du PN via un coupleur optique 4N35
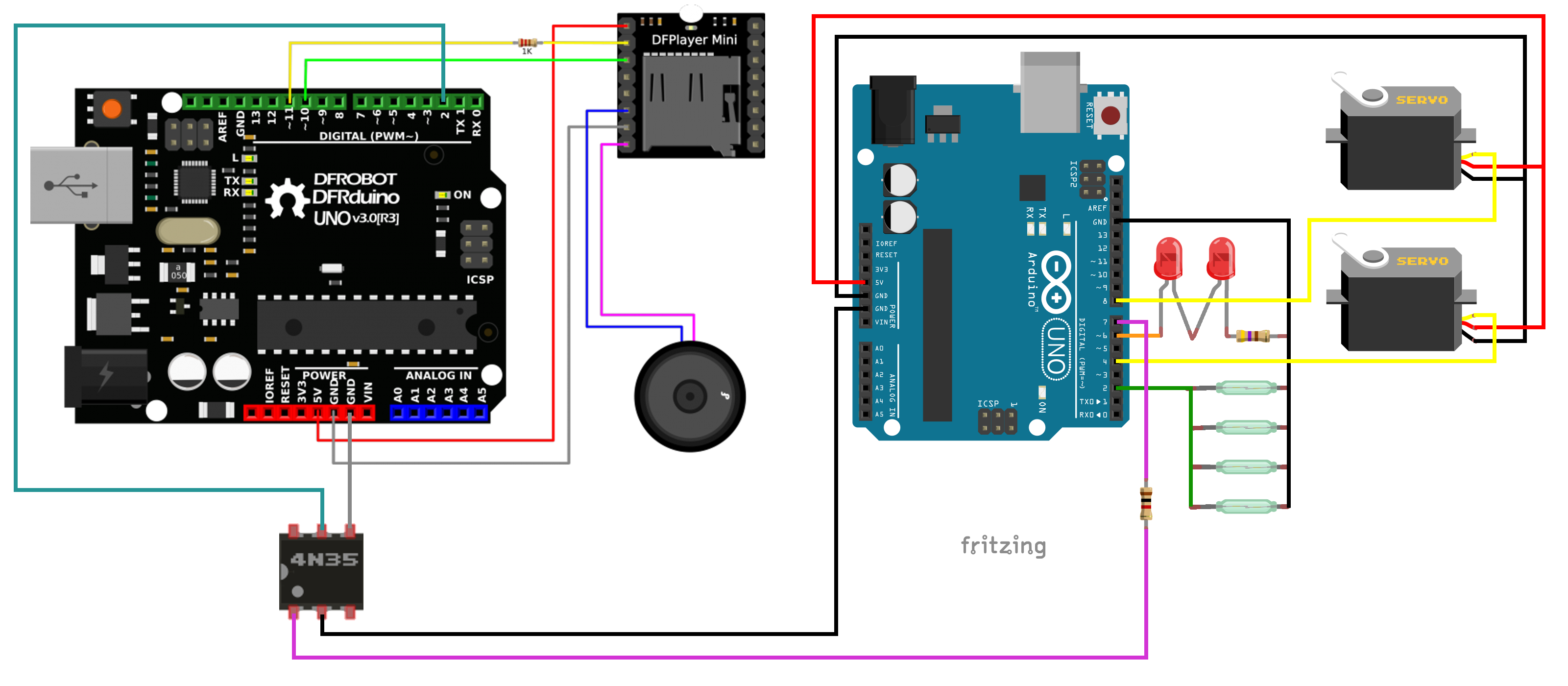
On utilise un coupleur optique 4N35 (ou équivalent) dont la LED est alimentée par la sortie 7 de la carte de commande du PN à travers une résistance de limitation de courant de 1 kΩ. Lorsque cette LED est allumée, le transistor est passant et l’entrée 2 de la carte Uno du module son est reliée à la masse. Ce coupleur optique permet une isolation galvanique des deux cartes Arduino.
Programme du module son
Le programme est inspiré d’un programme de démonstration donné sur le site du constructeur DFRobot, modifié selon nos besoins. Le principe consiste à surveiller les changements d’état de l’entrée 2 sur laquelle est installé le coupleur optique. Tant que le transistor du coupleur optique n’est pas passant, cette entrée est à l’état haut car elle a été initialisée en INPUT_PULLUP. Lorsque la sortie son (sortie 7) de la carte de commande du PN est à l’état haut, la LED du coupleur optique est allumée et le transistor devient passant : l’entrée est alors à l’état LOW. Un changement d’état de cette entrée de HIGH vers LOW commande la lecture du fichier son et un changement d’état de cette entrée de LOW vers HIGH arrête cette lecture. La carte PN provoque un événement (faut-il ou non du son ?) et l’information est envoyée à la carte son, ce qui provoque un changement d’état de l’entrée. On surveille donc les changements d’état de l’entrée et lorsqu’ils ont lieu, on regarde l’état de l’entrée qui indique l’opération à réaliser (produire du son ou l’arrêter).
Le programme commence par instancier un objet appelé myDFPlayer à partir de la bibliothèque DFRobotDFPlayerMini. Pour commander la lecture du fichier son, nous utilisons la fonction myDFPlayer.play(1) qui lit le premier fichier son de la carte micro-SD (cette carte n’a d’ailleurs pas besoin d’avoir plusieurs fichiers pour notre application). Pour arrêter la lecture du fichier son, on utilise la fonction myDFPlayer.stop() (ici pas besoin de préciser le numéro du fichier audio, c’est celui en cours de lecture qui est arrêté).
/*********************************************************
PNA_CommandeSonnerie
---------------------------------------------------------
Ce programme commande la sonnerie du PN selon les
changements d'etat de l'entree entreeCommande
De HIGH -> LOW : joue sonnerie
De LOW -> HIGH : arrete sonnerie
---------------------------------------------------------
Christian BEZANGER - mai 2020
Programme dans le domaine public
********************************************************/
#include "Arduino.h"
#include "SoftwareSerial.h"
#include "DFRobotDFPlayerMini.h"
SoftwareSerial mySoftwareSerial(10, 11); // RX, TX
DFRobotDFPlayerMini myDFPlayer;
void printDetail(uint8_t type, int value);
const byte entreeCommande = 2; // entree commandee par carte PN
const int volumeSon = 25; // volume du son entre 0 et 30 (a regler)
int etatEntree = HIGH; // etat courant de l entree de commande
int old_etatEntree = HIGH; // etat précedent de l entree de commande
void setup()
{
pinMode (entreeCommande, INPUT_PULLUP); // inactive a etat HIGH
mySoftwareSerial.begin(9600);
Serial.begin(115200);
Serial.println();
Serial.println(F("DFRobot DFPlayer Mini Demo"));
Serial.println(F("Initializing DFPlayer ... (May take 3~5 seconds)"));
if (!myDFPlayer.begin(mySoftwareSerial)) { //Use softwareSerial to communicate with mp3.
Serial.println(F("Unable to begin:"));
Serial.println(F("1.Please recheck the connection!"));
Serial.println(F("2.Please insert the SD card!"));
while(true);
}
Serial.println(F("DFPlayer Mini online."));
myDFPlayer.volume(volumeSon); // Regle le volume entre 0 et 30
myDFPlayer.play(1); // Joue 3 secondes de sonnerie pour controle
delay(3000);
myDFPlayer.stop(); // fin initialisation
}
void loop()
{
etatEntree = digitalRead(entreeCommande); // lecteure de l entree
if(etatEntree != old_etatEntree) {
// il y a eu changement d etat
if(etatEntree == LOW) {
myDFPlayer.play(1); // on joue la sonnerie
} // fin etatEntree LOW
if(etatEntree == HIGH) {
myDFPlayer.stop(); // on arrete la sonnerie
} // fin etatEntree HIGH
} // fin de comparaison
old_etatEntree = etatEntree;
// fin de traitement
// Imprime eventuellement des messages d erreur ou d etats du DFPlayer
if (myDFPlayer.available()) {
printDetail(myDFPlayer.readType(), myDFPlayer.read());
}
}
void printDetail(uint8_t type, int value){
switch (type) {
case TimeOut:
Serial.println(F("Time Out!"));
break;
case WrongStack:
Serial.println(F("Stack Wrong!"));
break;
case DFPlayerCardInserted:
Serial.println(F("Card Inserted!"));
break;
case DFPlayerCardRemoved:
Serial.println(F("Card Removed!"));
break;
case DFPlayerCardOnline:
Serial.println(F("Card Online!"));
break;
case DFPlayerPlayFinished:
Serial.print(F("Number:"));
Serial.print(value);
Serial.println(F(" Play Finished!"));
break;
case DFPlayerError:
Serial.print(F("DFPlayerError:"));
switch (value) {
case Busy:
Serial.println(F("Card not found"));
break;
case Sleeping:
Serial.println(F("Sleeping"));
break;
case SerialWrongStack:
Serial.println(F("Get Wrong Stack"));
break;
case CheckSumNotMatch:
Serial.println(F("Check Sum Not Match"));
break;
case FileIndexOut:
Serial.println(F("File Index Out of Bound"));
break;
case FileMismatch:
Serial.println(F("Cannot Find File"));
break;
case Advertise:
Serial.println(F("In Advertise"));
break;
default:
break;
}
break;
default:
break;
}
}Ce programme est à téléverser dans la carte Arduino du module son ; au préalable, pensez à modifier la valeur de volumeSon pour augmenter ou baisser le volume sonore.
L’alimentation du module son se fait par le câble USB et une prise de smartphone, comme préconisé pour la carte de commande du PN. Bien évidemment d’autres solutions d’alimentation sont possibles et ont été décrites sur ce site.
Vous trouverez ci-dessous un fichier son au format MP3 d’une durée de 15 secondes, ce qui est bien suffisant pour nos réseaux.
Sonnerie du PN

Sonnerie_PN
Cette série d’articles pourrait se terminer ici puisque nous avons reproduit le fonctionnement complet d’un passage à niveau automatique SAL 2. Néanmoins, je vous donne rendez-vous pour un cinquième et dernier article où nous verrons quelques améliorations possibles et comment dépanner ce montage s’il ne fonctionne pas du premier coup.